


 下一版
下一版





 |
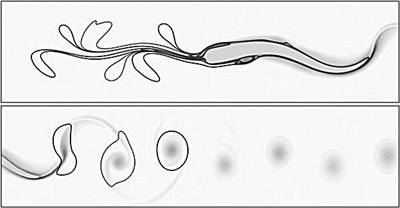 |
| 图为三个水涡旋,在鱼运动前(上图)和运动后(下图)的样子。图片来源:F.Huhn/苏黎世联邦理工学院 |
 |
| ① |
 |
| ② |
 |
| ③ |
 |
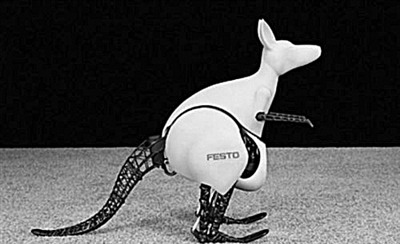
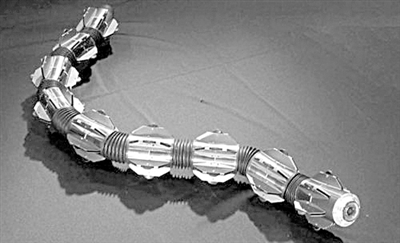
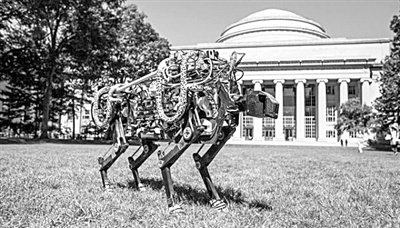
| ④ ①袋鼠机器人 ②机器蛇 ③猎豹机器人 ④狼蛛机器人 |
在亿万年的进化中,动物在与自然进行生存斗争的过程中,形成了某些特殊的超凡能力。研究和借鉴动物身上的智慧,人类可以师法自然,从中汲取灵感,获得更大的技术突破。
鱼类是怎么游泳的?蚊子是怎么在水上漂浮的?鸟类为何能自觉保持队形?这些看似简单的问题,其实蕴含着不可估量的科学价值。探索动物界的奥秘,不仅仅是满足人类的求知欲和好奇心,更为人类师法自然提供了无穷无尽的灵感,从而推动科学研究取得更大的突破。
揭开鱼类游泳奥秘,机器鱼研究有望突破
早在20世纪90年代,麻省理工学院研制的第一条机器鱼——“仿生金枪鱼”就进行了水下实验。尽管这项工作十分超前,但有关鱼类如何游泳的原理至今仍然模糊不清。这成为挡在水生机器人专家面前的一个难题。
不过,这一横亘多年的难题已经拨云见日。来自《环球科学》的文章称,通过分析鱼类游泳时周围水体的“拉格朗日拟序结构”,科学家日前揭示了鱼类在水中游进的物理机制,该研究方法有助于对飞机飞行动力学和其他复杂流体流动的研究。该研究组的成果于6月23日发表在由美国物理联合会出版的期刊《混沌》中。
最近,瑞士苏黎世联邦理工学院的研究组发现,通过将水体拆解成一系列独立的涡流可以研究鱼类在水中的游进运动。在一系列的模拟实验中,研究者们将注意力集中在离鱼身最近的水涡旋上。“我们认为这些涡旋对于鱼类在水中游进起到了关键作用。这些水流在旋转,这一事实本身就清楚地说明了鱼体和水体之间有着很强的相互作用”,该项目的带头研究者弗洛里安·休恩(Florian Huhn)这样说。
研究组对鱼类的两种游进方式做了模拟研究。第一种是平稳运动,也即常规的波浪式游进。另一种是逃脱反应,即鱼身先迅速弯成“C”的形状,然后向外翻转快速游进。
研究者们发现,对于做平稳运动的鱼类,它们的游进很大程度上来自于鱼体和分离水涡旋之间动量的交换。而对于逃脱反应,水涡旋同样可以在很大程度上解释运动机制,但“还有一类被涡旋区包围的非旋转水流区也在鱼类的游进机制中起到了很重要的作用”,休恩说。
休恩认为他们的方法也将有助于流体分析。“当一个物体在流体中前行时,无论是空中的鸟还是水中的鱼亦或飞机、轮船,涡旋就会被产生,我们的方法可以被用来定位和了解这些涡旋的形成和演化”,他说。
研究团队对“拉格朗日拟序结构”的定量测定,将有助于机器人设计专家开展接下来的工作。如果知道这些涡旋的旋转机制,以及涡旋中的水含量,机器人专家或许就能够设计出能向前推进的机器鱼。
学习蚊子“水上漂”,设计未来水上机器人
小型半水生节肢动物,如蚊子和水黾,因其独特的腿部结构,有着很好的水面活动能力,它们的腿可以有效地踩水从而使其能够在水面上自由漂浮。
通过研究蚊腿的不同部位在做运动时对水面产生的作用力,中国石油大学(华东)和辽宁科技大学的研究者揭开了蚊子能够在水面上运动的机械原理,这一发现可被用于设计仿生结构,如水上机器人和小型船。
“这项研究加深了我们对于水生昆虫水面运动机理的理解”,中国石油大学工程力学系教授刘建林说。近日,他们将这项研究发表在美国物理联合会出版的《AIP Advances》期刊上。
蚊子的大腿由三节组成:坚硬的股骨从昆虫的腹部伸出,通过关节连接后面同样坚硬的胫节,胫节又分支出一条长而柔韧的踝骨。以前人们对于昆虫水面活动能力的测量主要集中在整条大腿上,很大程度上忽略了踝骨的作用。
在实验中,研究者们将钢针附着在蚊子的大腿上,钢针连接着压头和微感应器,这样便可以测量蚊子的踝骨在水面上的浮力。这套装置可能让研究者们现场调整蚊腿和水面之间的角度和作用力,同时通过光学显微镜和数码相机测量相关数据。
刘建林和他的同事们发现昆虫能够浮动在水面上的能力——也即通过它的六条腿产生的相当于自身体重20倍的向上的支撑力——完全归功于昆虫踝骨与水面平行接触时的浮力。
“这一发现推翻了以往认为蚊腿越长,越能有效地产生浮力的经典观点”,刘建林说。
通过减少蚊腿与水面接触的面积,水面对昆虫所产生的粘附力也会显著减小,从而有助于蚊子飞离水面。
蚊子的踝骨能够产生如此大的支持力,其单位长度的结构能力如何,这是研究组正在着手研究的课题。下一步刘教授和他的同事们要对蚊腿的微结构,湿附着力和动态行为展开研究。
研究鸟群队形信息,无人机不再独自飞翔
鸟群中的鸟为了总能保持飞在一起,需要彼此交换飞行轨迹信息。科学家尝试用随鸟群高速飞行的波来为这种通信建模,一项新的分析显示,小的鸟群和大的鸟群中用于传递信息的波或许不一样,而在中等大小的鸟群中甚至没有哪一种波能起到作用。
此前关于鸟群集体行为的研究表明,鸟类在成群飞行时,喜欢在彼此之间保持固定的距离。当一只鸟转向时,它的邻居也会调整自身的位置,从而造成鸟群中密度的波动,产生一阵向外的密度波,正是这种密度波在整个鸟群中起到了通讯的作用。然而,近期一项分析发现,鸟群中的信息可能还是通过飞行方向变化的波,或者说“自旋”来传播更为有效。当一只鸟改变飞行方向时,它周围的所有鸟都随即改变方向,这一信息就向外传播开来——就跟磁性材料中的自旋波一样。
来自意大利国家研究委员会的安德烈·卡瓦尼亚(Andrea Cavagna)和同事们近期使用了这一自旋波模型,把鸟当作一个大的水动力系统中的液体成分,自旋波和密度波都存在。研究者发现,在小型鸟群中,只有自旋波能传播,在大型鸟群中密度波则占主导地位,而在中等大小的鸟群中,两种波都无法传播,就使得这一大小的鸟群无法稳定存在。研究结果对其他动物群体也有启发作用,如鱼群和哺乳动物群。
此前,来自匈牙利的研究团队开发了一款算法能够开发让无人机像鸟群一样飞翔。他们的传感器和图像能够形成网路,并且能够彼此分享信息,遇到坏天气时能够协同飞行。这样,无人机之间能够互相保护,并完成更多工作。对鸟群自觉保持队形的深入研究,或将推动无人机更具有“合作精神”。
■延伸阅读
十款最牛仿生机器人
机器狗
波士顿动力公司研制的机器狗使用电动/液压系统,它能够在室内和户外操作,这种四腿机器狗可以在崎岖地形奔跑、攀爬楼梯,当身体被踢后仍能保持身体平衡。
袋鼠机器人
袋鼠机器人是德国费斯托公司研制的一款模拟动物的机器人,它能够模拟袋鼠独特的运动特征,跳跃中能够恢复能量,存储并有效地用于下一次跳跃。
乌龟机器人
这种外型颇似乌龟的机器人被命名为“沙滩机器人”,是由迪斯尼研究实验室研制的,它装配一个可收缩耙状装置和传感器,能够在沙滩中行进。
大象机器人
大象机器人是使用45吨可回收木材和钢铁制造的,它能一次携载49名乘客,行走45分钟。
机器鸟
美国俄勒冈州立大学动力机械实验室研制的一款机器鸟,能够两腿奔跑,是移动速度最快、最敏捷的机器人,它的平衡能力较强,可以抵挡踢打和重击,甚至躲避碰撞。
机器蛇
日本研制的ACM-R5H模拟蛇,可用于搜索营救任务,以及水下环境勘测。在机器蛇身体前端安装着无线相机,能够拍摄到清晰的图像。
蚂蚁机器人
德国费斯托公司擅长研制模拟动物的机器人,蚂蚁机器人就是其中之一。一群蚂蚁机器人能够协同工作处理任务,类似于真实蚂蚁在一起完成一个共同任务。
鲨鱼机器人
美国海军最新研制一款机器人叫做“幽灵游泳者”,外型颇似鲨鱼,可以实现无人操控潜水航行,体长1.5米,重量45公斤,它可用于情报侦察、监测任务,以及检测船体安全性。
猎豹机器人
波士顿动力公司研制的一款猎豹机器人,奔跑速度快于任何人类,可达到时速45.5公里,能够模拟猎豹的奔跑方式。
狼蛛机器人
Robugtix公司研制的T8机器人,采用3D打印部件组装而成,能够模拟狼蛛运动方式,身体上安装着26个不同电动机,每条腿上安装3个,腹部安装2个。