


 下一版
下一版





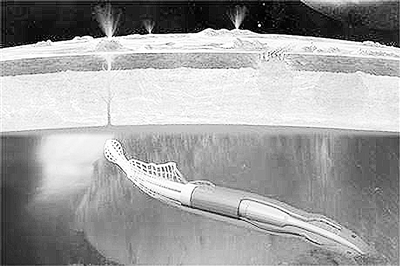 |
科技日报北京5月15日电 (记者房琳琳)可以在遥远卫星和行星上的海洋中畅游的自维持两栖机器人,可能成为太空探索机器人的迭代新品。美国康奈尔大学的工程团队已经收到美国国家航空航天局(NASA)提供的为期9个月、10万美元的拨款,任务是开发一款软体游泳机器人(概念图如下),用以探索以木卫二为代表的地外天体上的恶劣环境。
这种超凡脱俗的机器人由康奈尔大学机械与航空航天工程教授梅森·派克主持开发,与其合作的是首席科学家罗博·夏普特。这次开发任务将整合派克在航空航天系统工程应用方面的经验和夏普特在软体机器概念方面的研究,还将融合最新的3D打印新材料制作的变形机器人技术。
夏普特说:“我们正在筹划研发的这种软体机器人能像鳗鱼那样行动。”机器人的触手状结构提供的电动带缆,能让考察木卫二或其他星体的机器人从已有的强电磁场获得电力。它将不再依赖太阳能或核能系统,也不会接受来自地球寄送的燃料,而完全靠环境中现存的资源产生能量,或许会通过电解水来获取电能。科学家构想,氢气和氧气的混合物将存储在机器人身体和四肢内,内部产生的火花点燃气体并将之传递到机器人的各个部位,气体的膨胀和紧缩会驱动机器人的探索活动。此外,机器人将配备可伸缩、电致发光的皮肤,能够照亮周围的环境,还能根据情况在水下拍照。
木卫二是一个覆盖了液态湖水和海洋的星球,科学家猜测那里有一个地下海洋,为生命提供了适宜生存的栖息地。派克说:“软体机器人或许能帮我们理解木卫二海洋环境中的生物是如何获得能量来维持生命的。”
美国康奈尔大学网站消息称,这个任务是NASA“创新先进概念项目(NIAC)”拨款支持的15个研究内容之一,NIAC项目的目标是通过工程技术的进步“把科幻小说变成科学事实”。如果这个概念成功实施,这个研发任务还将获得NIAC第二期大约50万美元的资助。