


 下一版
下一版





 |
| ① |
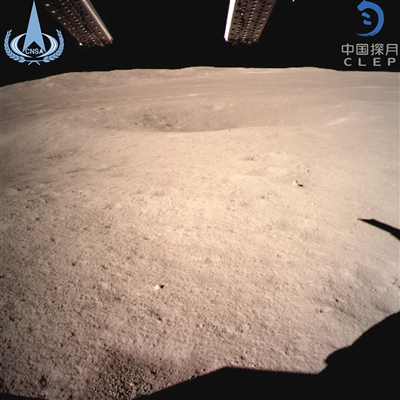 |
| ② 图① 玉兔二号踏上月面。 图② 嫦娥四号着陆器监视相机C拍摄的着陆点南侧月球背面图像。 国家航天局供图 |
本报记者 付毅飞
记者从国家航天局获悉,嫦娥四号着陆器与巡视器已于1月3日夜里顺利分离,玉兔二号巡视器驶抵月球表面。着陆器上监视相机拍摄的玉兔二号在月背留下第一道痕迹的影像图,由“鹊桥”中继星顺利传回地面。
1月3日10时26分,嫦娥四号探测器成功着陆在月球背面东经177.6度、南纬45.5度附近的预选着陆区,并通过鹊桥中继星传回了世界第一张近距离拍摄的月背影像图。此次任务实现了人类探测器首次月背软着陆、首次月背与地球的中继通信。
记者从国家航天局获悉,10时15分,科技人员在北京航天飞行控制中心发出指令,嫦娥四号从距离月面15公里处开始实施动力下降,7500牛变推力发动机开机,逐步将探测器速度从相对月球1.7公里每秒降到零。在距月面6至8公里处,嫦娥四号进行快速姿态调整,不断接近月球;在100米处开始悬停,对障碍物和坡度进行识别,并自主避障;选定相对平坦的区域后,开始缓速垂直下降。约690秒后,嫦娥四号自主着陆在月球背面南极艾特肯盆地内的冯·卡门撞击坑内。落月过程中,降落相机拍摄了多张着陆区域影像图。
落月后,嫦娥四号在地面控制下,通过鹊桥中继星的中继通信链路,进行了太阳翼和定向天线展开等多项工作,建立了定向天线高码速率链路。11时40分,着陆器监视C相机获取了世界首张近距离拍摄的月背影像图并传回地面。图中展示了巡视器即将驶离着陆器、驶向月背的方向。
嫦娥四号探测器由着陆器和巡视器组成,共配置包括2台国际合作载荷在内的8台有效载荷,其中着陆器上安装了地形地貌相机、低频射电频谱仪、月表中子及辐射剂量探测仪等载荷;巡视器上安装了全景相机、测月雷达、红外成像光谱仪和中性原子探测仪。这些仪器将在月球背面通过就位和巡视探测,开展低频射电天文观测与研究,巡视区形貌、矿物组分及月表浅层结构研究,并试验性开展月球背面中子辐射剂量、中性原子等月球环境研究。此外,着陆器还搭载了月表生物科普试验载荷。
着陆器与巡视器分离
1月3日嫦娥四号探测器成功落月后,科技人员按计划开展了着陆器与巡视器分离各项准备工作,对鹊桥中继星状态、着陆点环境参数、设备状态、太阳入射角度等两器分离的实施条件,进行了最终检查确认。
1月3日15时07分,科技人员在北京航天飞行控制中心通过鹊桥中继星向嫦娥四号探测器发送指令,两器分离开始。记者从北京航天飞行控制中心飞控大厅屏幕上看到,嫦娥四号着陆器矗立月面,太阳翼呈展开状态。巡视器立于着陆器顶部,展开太阳翼,伸出桅杆。随后,巡视器开始向转移机构缓慢移动。转移机构正常解锁,在着陆器与月面之间搭起一架斜梯,巡视器沿着斜梯缓缓走向月面。22时22分,巡视器踏上月球表面。
GNC系统控制落月全程
记者从中国航天科技集团五院了解到,相比嫦娥三号,嫦娥四号的落月难度更大。一方面,嫦娥三号着陆区地形起伏仅800米,堪称“平原”;而嫦娥四号着陆区地形起伏达到6000米。更重要的是,嫦娥四号与地面交流需要通过鹊桥中继星中转,其间会产生约60秒的延时,这对于瞬息万变的降落过程显然太久。因此,落月全程需要由嫦娥四号自主完成。
嫦娥四号的成功落月,将我国航天器制导、导航与控制(GNC)技术提升到了新的高度。
由五院502所研制的GNC系统,负责嫦娥四号奔月、环月、落月整个过程的控制,特别是近月制动和落月的过程,没有重来的机会,对系统可靠性有着极高要求。
地形崎岖使得此前嫦娥三号的飞行轨迹无法适用,不可见又导致关键阶段地面支持能力有限。在充分研究月面预定着陆区地形特点的基础上,502所科研团队设计了适应新地形的落月轨迹方案。为减少对地面的依赖,他们修改了原有设计,大大提高了系统的稳定性和在危急状况下的生存能力;同时完善了故障应对措施,将原本依赖人工处理的故障预案全部放手交给着陆器自行决断,大大提高了故障应对速度。
正如我们开车时需要行车雷达和倒车雷达辅助,引导嫦娥四号落月的GNC系统也需要各种探测器提供测量参数。五院研制的测距测速敏感器,通过精确把握速度和距离信息,为嫦娥四号安全降落提供了支持。
根据嫦娥四号着陆环境的特点,科研团队对此前嫦娥三号的测距测速敏感器进行了升级和优化。
着陆缓冲机构防止落地时“闪腰”
虽然嫦娥四号不怕黑、不恐高,却担心在着陆瞬间“闪了腰”。为此五院给它研制了4条强有力的“腿”,不仅能让它稳稳着陆,还能有效吸收着陆时产生的冲击力,防止它身上的设备被震坏。
嫦娥四号的腿学名叫“着陆缓冲机构”。每条腿都包含1个主腿和2个副腿,各有分工。着陆前,副腿推着主腿向外侧展开,锁定在规定角度;主腿负责在着陆时安全支撑、吸收冲击力。为了在减轻重量的同时保证强度,主腿和副腿的外壳被设计成又长又薄的圆筒,采用了强度极高的铝合金材料,其中还填充有缓冲蜂窝材料。研制期间,五院技术人员攻克了多项工艺制造难题。
在嫦娥四号的腿上,还长着脸盆一样的圆形大脚掌,这种设计可以更好地防止它在着陆时摔倒。大脚掌外观简单,内部构造却十分复杂。其中央装有一个形状特别的金属结构,如同足弓,可以有效分散冲击力。脚掌里还填充了致密的蜂窝材料,以起到缓冲作用。
(科技日报北京1月3日电)