


 Next
Next
 Economy Momentum Leads Transformation of Green Finance
Economy Momentum Leads Transformation of Green Finance- Washington's Attempt to Suppress China Backfiring
- Restrict Technology Flows Could Reduce Global Knowledge Availability
- Don't Be Hypocrite in Maintaining Cybersecurity
- Soft Hand Exoskeleton Benefits Stroke Patients
- Ecological Restoration Path with Chinese Characteristics




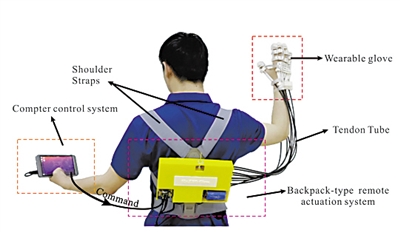 |
| The soft hand exoskeleton is composed of three systems: wearable glove, wearable backpack-type remote actuation system, and a computer control system. (PHOTO: SCREENSHOT) |
A hybrid soft hand exoskeleton, which combines a flexible link with a tendon-driven soft glove to drive thumb motion, has been developed by researchers from Shenyang Institute of Automation, Chinese Academy of Sciences. The impressive hardware can help stroke patients do self rehabilitation exercises or serve as a daily living assistance device for patients with hand dysfunctions.
The hand exoskeleton is composed of three main systems, a wearable glove which weighs less than 200g; a backpack-type remote actuation system (RAS) that drives the wearable glove through the tendon tubes; and a computer control system that plans the motions and commands the RAS.
The exoskeleton is designed based on the analysis of the human musculoskeletal anatomy and the basic motion types of the thumb. At least two degrees-of-freedom (DoF) of motions (flexion/extension, and abduction/adduction) are needed in order to generate arbitrary thumb motions. Therefore, four biomimetic tendons (flexor, extensor, abductor, and adductor) are needed for generating the thumb motions.
To reduce the number of actuators, a simple pulley mechanism is employed to generate bidirectional motions. As a result, this hybrid configuration can perform dexterous thumb operations (such as thumb encircling) with only two actuators. Minimizing the number of actuators would benefit patients as it reduces the cost of the device without sacrificing the dexterity of it.
The device has been tested on a stroke patient with hemiplegia and a healthy person. The experimental results show that the hand exoskeleton could assist the stroke patient to accomplish various training tasks, such as thumb encircling, grasping, pinching, releasing, and writing.