
 下一版
下一版





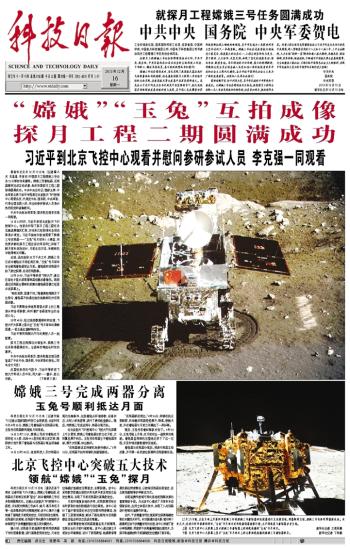
北京飞控中心突破五大技术
领航“嫦娥”“玉兔”探月
科技日报北京12月15日电 (通讯员姜宁 谢波 记者付毅飞)今天晚上,嫦娥三号着陆器、巡视器在月面相互拍照“留念”,标志着嫦娥三号任务取得圆满成功。记者从北京航天飞行控制中心获悉,为实现对嫦娥三号奔月、绕月、落月和巡月等一连串精彩动作的精准控制,该中心集中力量突破了高精度月面视觉定位、月面巡视动态规划、巡视器行走控制、巡视器可视化操作与控制和多体制深空干涉测量数据处理五项关键技术。
据介绍,巡视器月面遥操作要利用探测器下传的图像数据,进行高精度视觉定位,只有定位准确才能确定往哪里走,去哪探测。该中心采用数字图像处理技术和光束平差及视觉交会定位算法,实现了月面巡视器的高精度定位。
月面环境复杂地形多样,巡视探测须结合实时获取的地形数据进行动态规划。该中心设计了基于规划图的状态空间前向搜索算法,构建了三层规划模型,解决了路径规划与巡视勘察自动验证和动态改进的难题。
地面需要控制巡视器规避各类月面障碍,实现安全的月面行驶控制。该中心通过建立月面综合环境模型,设计了里程最短、能源最省等最优路径搜索算法,以控制巡视器实现盲走、自主规划避障等多种移动方式。
实现遥操作控制可视化是地面指挥决策的重要辅助手段。为此该中心建成了月球车手动驾驶系统,应用立体显示技术,实现了人在回路进行控制的遥操作环境。
此外,干涉测量信号处理是深空探测准确定轨的关键技术环节。针对新建的佳木斯、喀什两个新建深空站干涉测量信号的处理,该中心突破了差分单程测距、同波束干涉测量等数据处理技术,为探月轨道确定和月面高精度定位提供了新手段。